Electronics and Communication Engineering - Exam Questions Papers
Exercise : Exam Questions Papers - Exam Paper 12
- Exam Questions Papers - Exam Paper 12
- Exam Questions Papers - Exam Paper 22
- Exam Questions Papers - Exam Paper 21
- Exam Questions Papers - Exam Paper 20
- Exam Questions Papers - Exam Paper 19
- Exam Questions Papers - Exam Paper 18
- Exam Questions Papers - Exam Paper 17
- Exam Questions Papers - Exam Paper 16
- Exam Questions Papers - Exam Paper 15
- Exam Questions Papers - Exam Paper 14
- Exam Questions Papers - Exam Paper 13
- Exam Questions Papers - Exam Paper 1
- Exam Questions Papers - Exam Paper 11
- Exam Questions Papers - Exam Paper 10
- Exam Questions Papers - Exam Paper 9
- Exam Questions Papers - Exam Paper 8
- Exam Questions Papers - Exam Paper 7
- Exam Questions Papers - Exam Paper 6
- Exam Questions Papers - Exam Paper 5
- Exam Questions Papers - Exam Paper 4
- Exam Questions Papers - Exam Paper 3
- Exam Questions Papers - Exam Paper 2
41.
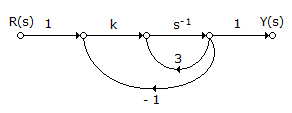
The system shown in figure remains stable when :
Answer: Option
Explanation:
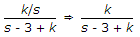
Pi = 1 x k x s-1 x 1 ⇒ 
 , L2 = k x s-1
, L2 = k x s-1
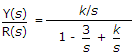
System will be stable when k - 3 > 0 or k > 3.
42.
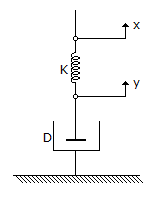
The mechanical system shown below has its pole(s) at:
Answer: Option
Explanation:
Kx(s) - Ky(s) = Dsy(s)
Kx(s) = Dsy(s) + Ky(s)

43.
The step error coefficient of a system 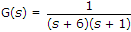 with unity feedback is :
with unity feedback is :
with unity feedback is :Answer: Option
Explanation:
kp = s → 0 G(s)H(s).
44.
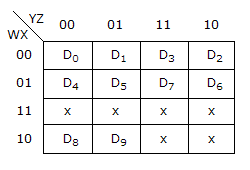
The following k-map implements
Answer: Option
Explanation:
As the K-map reveals W, X, Y, Z are the input lines to the device and D0 to D9 are the output lines which get activated depending upon the input combinations.
As seen from k-map for W, X, Y, Z from 0000 to 1001 we have D0 to D9 outputs activated respectively.
This operation is performed by BCD to Decimal decoder.
Also it is called as 1 off 10 decoder, as only 1 of 10 output line is high.
45.
The Z-transform of a signal is given by 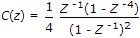 its final value is __________ .
its final value is __________ .
its final value is __________ .Answer: Option
Explanation:
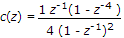
Final value 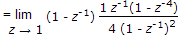
Final value 
Final value
 .
.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers