Electronics and Communication Engineering - Exam Questions Papers
- Exam Questions Papers - Exam Paper 12
- Exam Questions Papers - Exam Paper 22
- Exam Questions Papers - Exam Paper 21
- Exam Questions Papers - Exam Paper 20
- Exam Questions Papers - Exam Paper 19
- Exam Questions Papers - Exam Paper 18
- Exam Questions Papers - Exam Paper 17
- Exam Questions Papers - Exam Paper 16
- Exam Questions Papers - Exam Paper 15
- Exam Questions Papers - Exam Paper 14
- Exam Questions Papers - Exam Paper 13
- Exam Questions Papers - Exam Paper 1
- Exam Questions Papers - Exam Paper 11
- Exam Questions Papers - Exam Paper 10
- Exam Questions Papers - Exam Paper 9
- Exam Questions Papers - Exam Paper 8
- Exam Questions Papers - Exam Paper 7
- Exam Questions Papers - Exam Paper 6
- Exam Questions Papers - Exam Paper 5
- Exam Questions Papers - Exam Paper 4
- Exam Questions Papers - Exam Paper 3
- Exam Questions Papers - Exam Paper 2
The following statement which is false is __________ .

Statement (d) is false because a finite-duration sequence must have an ROC that includes the entire z-plane, except possible z = 0 and/or z = ∞
This is not consistent with having a pole at z = 1/2.
Statement (b) is true  corresponds to the value of the z-transform of h[n] at z = 2.
corresponds to the value of the z-transform of h[n] at z = 2.
Thus, its convergence is equivalent to the point z = 2 being in the ROC.
Since the system is stable and causal, all of the poles of H(z) are inside the unit circle, and the ROC includes all the points outside the unit circle, including z = 2.
Statement (c) is true. Since the system is causal, h[n] = 0 for n < 0.
Consequently, h[n] * h[n] = 0 for n < 0; i.e., system with h[n] * h[n] as its impulse response is causal.
The same is then true for g[n] = n[h[n]].
Furthermore, by the convolution property the system function corresponding to the impulse response h[n] * h[n] is H2(z), and by the differentiation property the system function corresponding to g[n] is
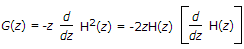
From above equation we can conclude that the poles of G(z) are at the same locations as those of H(z), with the possible exception of the origin.
Therefore, since H(z) has all its poles inside the unit circle, so must G(z).
It follows that g[n] is the impulse response of a causal and stable system.
Statement (a) is true because there is a zero on the unit circle.
When improvement in transient state response is required Lead compensator is used.
When improvement in steady state response is required lag compensator is used.
Use of lag-lead compensator increases the low frequency gain which improves the steady state while at the same time it increases bandwidth of the system making the system response very fast.
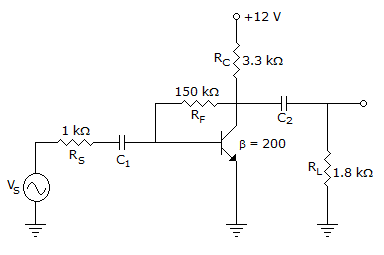

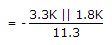 = - 103.07
= - 103.07
RF -> feedback resistor.
General expression for narrowband FM is
A cos (2pfct) - βA sin (2pfct) sin (2pfmt).
First bit is sign bit, hence its magnitude its
 → 2s complement
→ 2s complement
⇒ Sign bit is part of magnitude, so it may be 1.