Electronics and Communication Engineering - Signals and Systems
Exercise : Signals and Systems - Section 1
- Signals and Systems - Section 1
- Signals and Systems - Section 2
- Signals and Systems - Section 3
- Signals and Systems - Section 4
- Signals and Systems - Section 5
- Signals and Systems - Section 6
- Signals and Systems - Section 7
- Signals and Systems - Section 8
- Signals and Systems - Section 9
- Signals and Systems - Section 10
11.
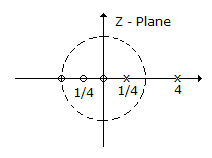
The z-transform of a particular signal is given
 where
where
The system after implementation will be
whereThe system after implementation will be
Answer: Option
Explanation:



Include unity circle and exterior of circle hence x(z) will be stable, causal.
12.
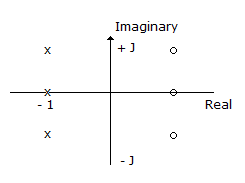
The system with given pole-zero diagram is
Answer: Option
Explanation:
Because no.of zero is more than Pole, therefore when you find transfer function.
Numerator power will higher than denominator, and such transfer functions is not realizable.
13.
A pole zero pattern of a certain filter is shown in figure. This filter must be
Answer: Option
Explanation:
In transfer function, no of zeros = no. of poles, hence it is all pass fliter.
14.
If transfer function of a system is H(z) = 6 + z-1 + z-2 then system is
Answer: Option
Explanation:
H(z) = 6 + z-1 - z-2, solve it by considering H(z) = 0 z = 1/3, -1/2 in H(z) only numerator.
Hence z = 1/3, - 1/2 will be zero, and if zero lies inside the unit circle, system will be of minimum phase.
15.
The period of the function cos  is
is
is
8s
4s

Answer: Option
Explanation:
 .
.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers