Verbal Reasoning - Cube and Cuboid - Discussion
Discussion Forum : Cube and Cuboid - Cube and Cuboid 5 (Q.No. 4)
Directions to Solve
The following questions are based on the information given below:
All the opposite faces of a big cube are coloured with red, black and green colours. After that is cut into 64 small equal cubes.
4.
How many small cubes are there whose only one face is coloured ?
Answer: Option
Explanation:
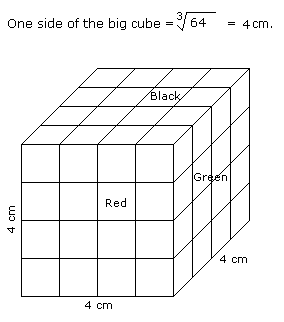
Number of small cubes having only one face coloured = 4 from each face
= 4 x 6
= 24
Discussion:
2 comments Page 1 of 1.
Pranay said:
1 decade ago
Other way of solving.
We have 3 formula for for same problem like one or 2 or 3 faces:
No side colored = (n-2)^3.
One side colored = 6*(n-2)^2.
2 side colored = 12*(n-2).
3 sided colored for cube always 8.
We have 3 formula for for same problem like one or 2 or 3 faces:
No side colored = (n-2)^3.
One side colored = 6*(n-2)^2.
2 side colored = 12*(n-2).
3 sided colored for cube always 8.
Sribash biswas said:
1 decade ago
If all the side is colored thenn the formula is
For only one side color = 6* (segment line -2) ^2.
For only one side color = 6* (segment line -2) ^2.
Post your comments here:
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers