Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 9
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
21.
For any transfer function, the constant phase angle loci are
22.
For an m x n matrix A, the eigen values are the roots of the characteristic equation
23.
In force current analogy, displacement x is analogous to
24.
Consider the following statements about variable reluctance stepper motor used in control system
- The static torque acting on rotor is a function of angular misalignment between stator and rotor teeth
- There are two positions of zero torque i.e, . Q = 0 and
 where T is the number of rotor teeth
where T is the number of rotor teeth - Both zero torque positions are stable
- When stator is excited, rotor is pulled into minimum reluctance position
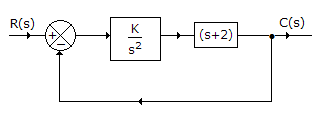
25.
For the system in the given figure, the gain margin is
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers