Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 9
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
46.
Assertion (A): If f(t) = 1 - e-t, 
Reason (R): 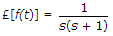
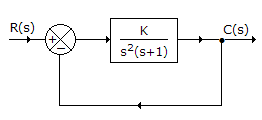
47.
The system of the given figure
48.
The poles with greater displacement from the real axis correspond to
49.
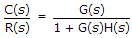
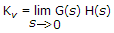
For a feedback system
Then the velocity error constant Kv is given by
Then the velocity error constant Kv is given by


50.
Which of the following is open loop system?
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers