Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 4
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
21.
If  then f(t) =
then f(t) =
then f(t) =22.
When time constant T in any factor is varied, the shapes of log magnitude and phase angle curves remain the same.
23.
Which of the following is not correct for two phase servomotor?
Answer: Option
Explanation:
In this motor ratio  is small or R is high.
is small or R is high.
24.
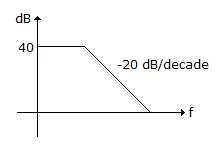
Given figure shows the magnitude plot for a system. The steady state error for unit step input is
25.
DC servomotors are, generally
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers