Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 4
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
16.
The open loop frequency response of a unity feed back system is as under
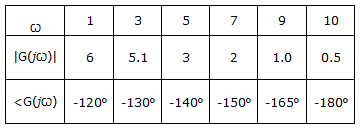
The gain margin and phase margin respectively are
The gain margin and phase margin respectively are
17.
Assertion (A): A large negative feedback is deliberately introduced in an amplifier to make its gain independent of variation in parameters of active device.
Reason (R): A large negative value of feedback results in a high value of return difference compared to unity which makes the feedback gain inversely proportional to the feedback factor.
Answer: Option
Explanation:
Gain with feedback =  .
.
18.
The transfer function 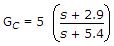 can be for
can be for
can be forAnswer: Option
Explanation:
For a lead compensator 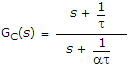 and a < 1
and a < 1
Therefore  is more than
is more than  .
.
19.
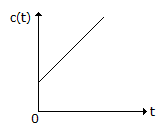
In response to a unit step input the controller output in given figure is for
Answer: Option
Explanation:
The intercept on y-axis is due to proportional action and inclined line is due to integral action.
20.
An electromechanical device which actuates a train of step angular movements in response to a train of input pulses on one to one basis is
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers