Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 2
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
21.
For the second order system having following differential equation
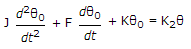
(When θ0 and θi are output and input) the natural frequency is
(When θ0 and θi are output and input) the natural frequency is


KJ

Answer: Option
Explanation:
Compare with standard form.
22.
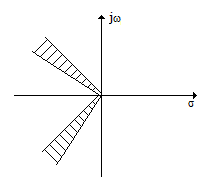
For a second order system, the position of poles is in the shaded region shown in the given figure. The variation in damping factor is
Answer: Option
Explanation:
Variation in damping factor is small.
23.
For a factor  in the transfer function, the log magnitude plot
in the transfer function, the log magnitude plot
in the transfer function, the log magnitude plotAnswer: Option
Explanation:
jω term in denominator gives a straight line with a slope of - 20 dB/decade and  gives a straight line with a slope of - 40 dB/decade.
gives a straight line with a slope of - 40 dB/decade.
24.
The frequency at which magnitude of closed loop frequency response is 3 dB below its zero frequency value is called critical frequency.
Answer: Option
Explanation:
It is not critical frequency.
25.
The transfer function  has the characteristics of high pass filter.
has the characteristics of high pass filter.
has the characteristics of high pass filter.Answer: Option
Explanation:
When ω is high, the output is low.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers