Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 2
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
16.
The transfer function 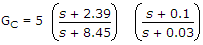 can be for
can be for
can be forAnswer: Option
Explanation:
For a lead-lag compensator 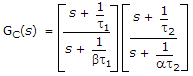
β > 1 and a < 1.
17.
The system of the given figure
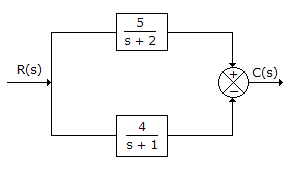
Answer: Option
Explanation:
Since 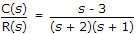 there are two poles at s = -2 and s = -1 and one zero at s = +3.
there are two poles at s = -2 and s = -1 and one zero at s = +3.
18.
For the given figure C(s)/R(s)
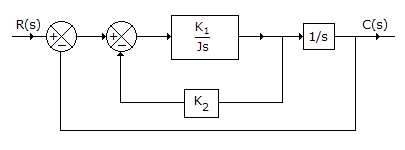
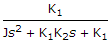
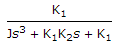
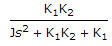
none of the above
Answer: Option
Explanation:
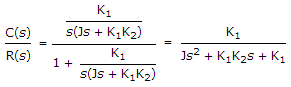 .
.
19.
If phase angle of open loop transfer function becomes - 180° at frequency ω1, then gain margin is equal to
|G(jω1)|

1 + |G(jω1)|

Answer: Option
Explanation:
If gain is a, gain margin is  . In this case gain is |G(jω1)|.
. In this case gain is |G(jω1)|.
20.
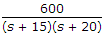
A system with transfer function
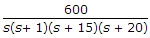
may be approximated by the system
may be approximated by the system



Answer: Option
Explanation:
Coefficient (s + 15) gives the term e-15t and the coefficient (s + 20) gives the term e-20t.
These can be neglected as compared to terms corresponding to s and (s + 1).
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers