Online Electronics and Communication Engineering Test - Automatic Control Systems Test
- This is a FREE online test. Beware of scammers who ask for money to attend this test.
- Total number of questions: 20.
- Time allotted: 30 minutes.
- Each question carries 1 mark; there are no negative marks.
- DO NOT refresh the page.
- All the best!
Marks : 2/20
Test Review : View answers and explanation for this test.
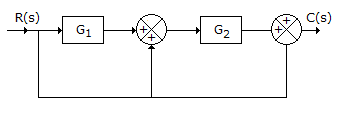
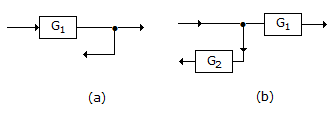
Transfer function = (G1 + 1) G2 + 1 = G1 G2 + G2 + 1.
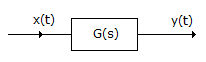
The magnitudes A and G(jω) are multiplied and phase angles are added.
 , 2. It means that there
, 2. It means that thereSince there are two sign changes in the first column, hence two roots in right half plane.

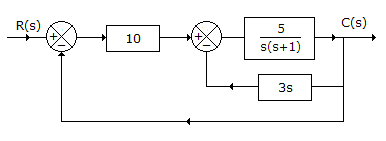




For the inner loop, transfer function = 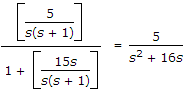
Then 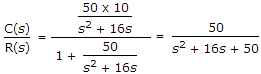 .
.
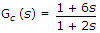 is
isThe maximum phase lead is given by 
In this case a = 1/3. Hence sin Φm =  = 0.5 or Φm = 30°.
= 0.5 or Φm = 30°.
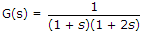
It does not become real at any frequency.
See transfer function in the equation  .
.
 . Then K =
. Then K =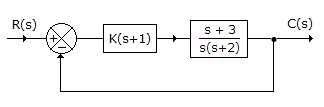




Assertion (A): For a given system only one of the static error constants is finite and significant.
Reason (R): If finite static error constant is large, the loop gain becomes smaller as ω approaches zero.






- a pair of potentiometers
- a pair of synchros
- a differential transformer
- a metadyne
- a control transformer
Assertion (A): If points at infinity are included, G(s) has same number of poles and zeros.
Reason (R): The function 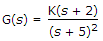 has a zero at s = - 2.
has a zero at s = - 2.