Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 8
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
36.
The system matrix of continuous time system described in state variable form is

The systems is stable for all values of x and y satisfying
The systems is stable for all values of x and y satisfying
37.
The addition of a pole to the open loop transfer function pulls the root locus
38.
Polar plot of a lag-lead compensator is a circle.
39.
For a type 0 system and unit ramp input, the steady state error is
40.
For the mechanical system in the given figure the transfer function  =
=
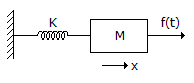
= 



Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers