Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 7
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
41.
For stable network the real parts of poles and zeros of driving point functions must be
42.
A compensating network has 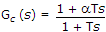 . If it is a phase lag circuit the value of a should be
. If it is a phase lag circuit the value of a should be
. If it is a phase lag circuit the value of a should be43.
Consider the following expressions which indicate the step or impulse response of an initially relaxed system
- [5 - 4 e-2t] u(t)
- [e-2t + 5] u(t)
- d(t) + 8 e-2t u(t)
- d(t) + 4 e-2t u(t)
44.
If Z is the number of zeros of 1 + G(s) H(s) in the right half s plane. N is the number of clockwise encircle elements of (-1 + jo) point. P is the number of poles of G(s) H(s) in right half s plane. The Nyquist stability criterion can be expressed as
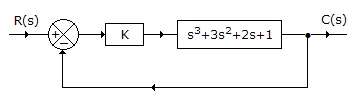
45.
The given figure shows a control system. The maximum value of gain for which the system is stable is
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers