Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 7
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
21.
The polar plot of transport lag is a unit circle.
22.
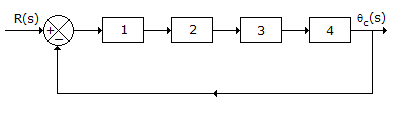
The given figure shows a hybrid servosystem. The components 1, 2, 3, 4 are respectively
23.
For the signal flow graph of the given figure consider the following statements
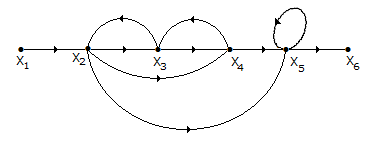
- It has three forward paths
- It has three individual loops
- It has two non touching loops
24.
For the transport lag G(jω) = e-jωT, the polar plot is
25.
Consider the following statements:
- The positiveness of coefficients of characteristic equation is necessary as well as sufficient condition for stability of first and second order systems.
- The positiveness of coefficients of characteristic equation ensures negativeness of real roots but is not sufficient condition for stability of third and higher order systems.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers