Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 6
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
36.
Assertion (A): Derivative control action is also called rate control and has an anticipatory character.
Reason (R): Derivative control amplifies noise signals.
37.
Assertion (A): When a PID controller is added to a system, the peak overshoot to step input cannot be determined easily.
Reason (R): Use of PID controller introduces a zero in the forward path.
38.
For the system shown in the given figure the time response to unit step input is
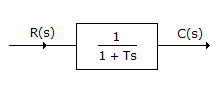

c(t) = T(1 - e-t/T)
c(t) = 1 - e-t/T
c(t) = T e-t/T
39.
The slope of log magnitude asymptote changes by - 40 dB/ decade at a certain frequency and the error between asymptote and actual curve is - 6 dB. This means that
40.
Friction forces acts in a direction
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers