Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 6
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
21.
For the function G(s) =  the poles are at
the poles are at
the poles are at22.
Which dc servomotor has minimum inertia?
23.
Gas flow resistance is defined as


(change in gas pressure difference) x (change in gas flow rate)
none of the above
24.
Examine the following statements
- A small size hydraulic actuator can develop good torque.
- It is easy to maintain a hydraulic system leak proof.
- Both linear and rotatary hydraulic actuators are available.
- Hydraulic power is more easily available than electric power.
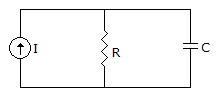
25.
The given figure shows a constant current source driving a parallel RC circuit. It is equivalent to
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers