Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 3
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
41.
The polar plot in the given figure is for the term
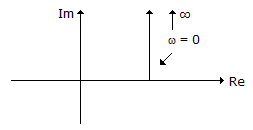
jωT
1 + jωT


Answer: Option
Explanation:
For the term 1 + jωt, magnitude is 1 at ω = 0 and infinite at ω = ∞.
42.
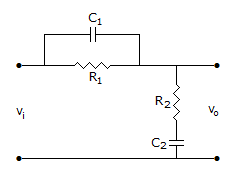
The compensator in the given figure is a
Answer: Option
Explanation:
Obtain transfer function.
43.
If G(s) H(s) =  , the closed loop poles are on
, the closed loop poles are on
, the closed loop poles are onAnswer: Option
Explanation:
Poles are at s = ± j 10.
44.
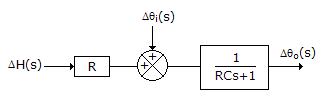
For the block diagram of the given figure, the equation describing system dynamics is
Answer: Option
Explanation:
Total input is [ΔH (s)]R + [ΔQi (s)]. This input gets multiplied by  to give AQ0(s).
to give AQ0(s).
45.
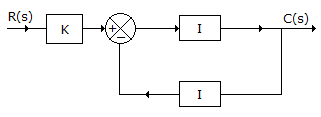
For the given figure C(s)/R(s)
Answer: Option
Explanation:
 .
.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers