Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 2
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
6.
The primary function of lag compensator is to provide sufficient
Answer: Option
Explanation:
It changes phase.
7.
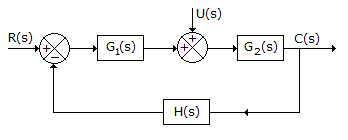
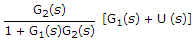
In the given figure, C(s) =



Answer: Option
Explanation:
Use principle of superposition. Initially assume R(s) = 0 and find C(s).
Then assume U(s) = 0 and find C(s). Add the two responses.
8.
For G(jω) = 
Answer: Option
Explanation:
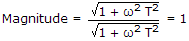
When ω = 0, phase angle is 0.
For high values of phase angle = - 90° - 90° = 180°.
9.
The transient response of a second order system is given by  for 5% criterion the settling time is
for 5% criterion the settling time is
for 5% criterion the settling time isAnswer: Option
Explanation:
For 5% criterion settling time = 3T =  .
.
Since ξωn = 4,  and 3T = 0.75 secs.
and 3T = 0.75 secs.
10.
The polar plot of a transfer function passes through (-1, 0) point. The gain margin is
Answer: Option
Explanation:
When polar plot passes through (-1, 0) the system is on limit of stability and gain margin is zero.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers