Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 1
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
36.
In Bode diagram (log magnitude plot) the factor  in the transfer function gives a line having slope
in the transfer function gives a line having slope
in the transfer function gives a line having slopeAnswer: Option
Explanation:
For  term the slope is -20 dB/decade or -6 dB/octave because - 20 log 2 = -6 dB.
term the slope is -20 dB/decade or -6 dB/octave because - 20 log 2 = -6 dB.
37.
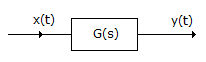
In the given figure the input is x(t) = A sin ωt. The steady state output y(t) =
Answer: Option
Explanation:
The magnitudes A and G(jω) are multiplied and phase angles are added.
38.
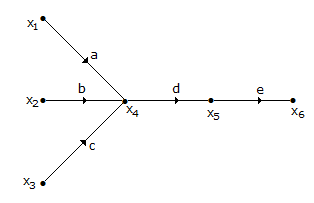
In the given figure x6 =
Answer: Option
Explanation:
The input x1 is multiplied by a, x2, by b and x3 by c. The sum total is multiplied by d and e.
39.
A negative feedback system has  . The closed loop system is stable for
. The closed loop system is stable for
. The closed loop system is stable forAnswer: Option
Explanation:
Find characteristic equation.
40.
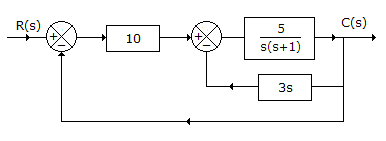
For the given figure, 




Answer: Option
Explanation:
For the inner loop, transfer function = 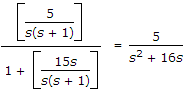
Then 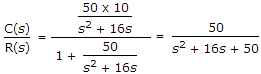 .
.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers