Electronics and Communication Engineering - Automatic Control Systems
Exercise : Automatic Control Systems - Section 1
- Automatic Control Systems - Section 1
- Automatic Control Systems - Section 2
- Automatic Control Systems - Section 3
- Automatic Control Systems - Section 4
- Automatic Control Systems - Section 5
- Automatic Control Systems - Section 6
- Automatic Control Systems - Section 7
- Automatic Control Systems - Section 8
- Automatic Control Systems - Section 9
- Automatic Control Systems - Section 10
11.
For the given figure C(s)/R(s)
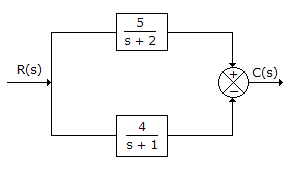




Answer: Option
Explanation:
 .
.
12.
A stepper motor is
Answer: Option
Explanation:
When input pulses are applied, the motor moves in steps.
13.
In a two phase ac servomotor rotor resistance is R and rotor reactance is X. The speed curve will be linear if



X2 = R
Answer: Option
Explanation:
In a two phase servomotor  ∠ < 1 so that torque speed curve is almost linear.
∠ < 1 so that torque speed curve is almost linear.
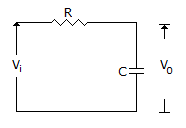
14.
In the given figure, the input frequency is such that R = XC. Then
Answer: Option
Explanation:
R = XC, voltage drops across R and XC are equal and at 90° with respect by each other. V0 lags Vi by 45°.
15.
From the noise point of view, bandwidth should
Answer: Option
Explanation:
If noise is to be eliminated, bandwidth cannot be large.
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers