Civil Engineering - GATE Exam Questions - Discussion
Discussion Forum : GATE Exam Questions - Section 5 (Q.No. 20)
20.
For the structure shown below, the vertical deflection at point A is given by
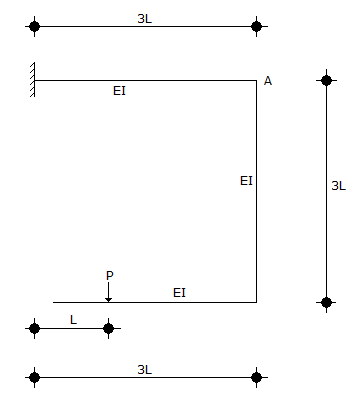


Zero

Discussion:
5 comments Page 1 of 1.
Rct said:
6 years ago
How? please explain it.
Mukesh Kumar said:
6 years ago
Answer is zero. I too agree.
Priyanka said:
9 years ago
Here, the answer should be zero.
Pavan kumar said:
9 years ago
I think the answer is zero.
A.Manohari said:
1 decade ago
I think there is no deflection at point A.
Post your comments here:
Quick links
Quantitative Aptitude
Verbal (English)
Reasoning
Programming
Interview
Placement Papers